Powered by an Arduino Nano, it transforms data into immediate action. Gyroscopes spin, accelerometers feel, and logic calculates.
Before imbalance becomes failure, it reacts. This is feedback talking to control, answering back at the speed of thought.
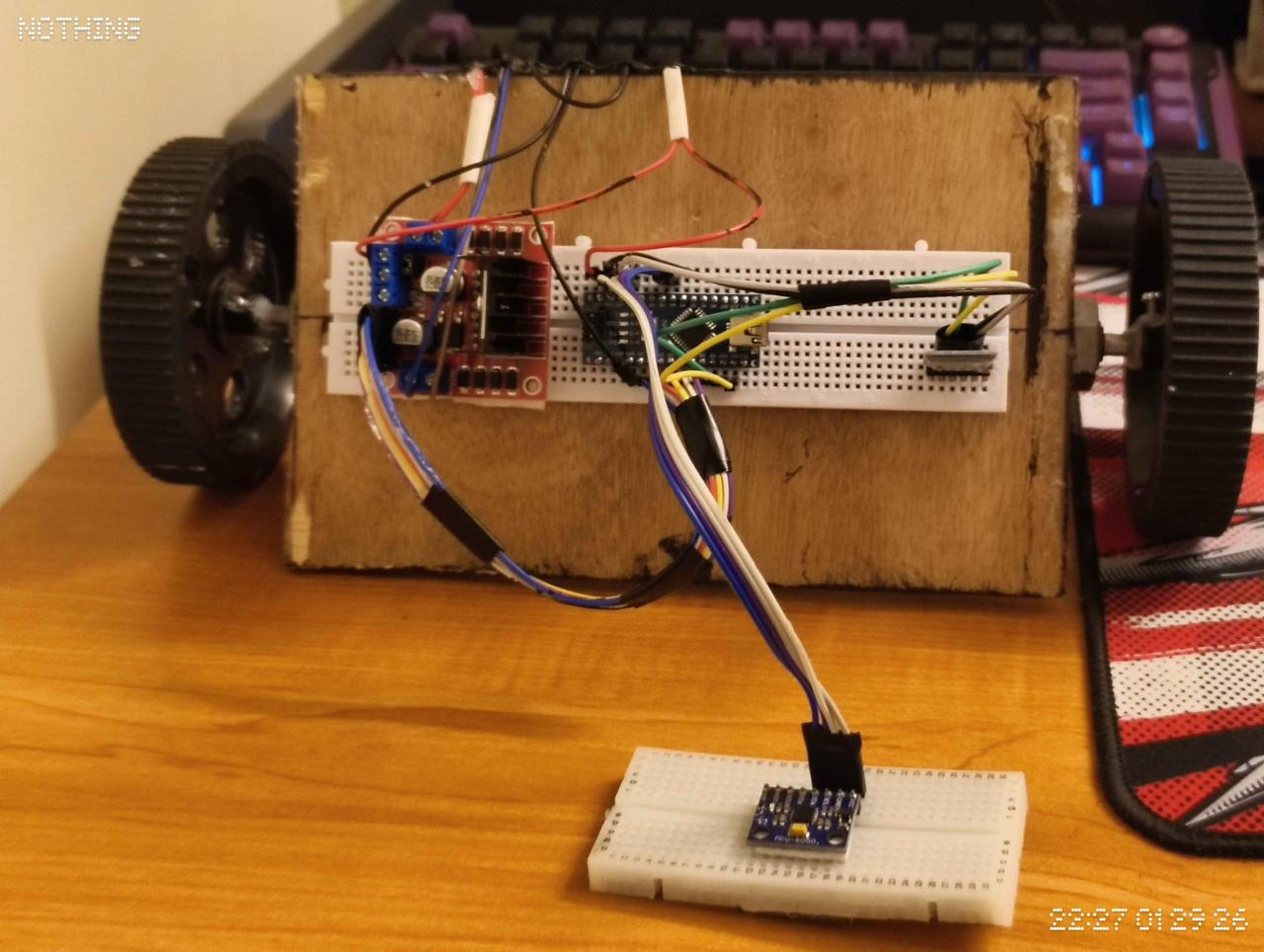
The  KOMEQ[R]large-scale self-balancing product is designed and developed using an Arduino microcontroller as the brain of the entire system. The Arduino continuously collects real-time data from an Inertial Measurement Unit (IMU) that combines a gyroscope and accelerometer to accurately detect tilt angle, direction, and angular speed of the structure. This sensor data is processed using mathematical filtering techniques to reduce noise and obtain stable orientation values. Based on this processed data, the system determines whether the product is leaning forward or backward and by how much.
KOMEQ[R]large-scale self-balancing product is designed and developed using an Arduino microcontroller as the brain of the entire system. The Arduino continuously collects real-time data from an Inertial Measurement Unit (IMU) that combines a gyroscope and accelerometer to accurately detect tilt angle, direction, and angular speed of the structure. This sensor data is processed using mathematical filtering techniques to reduce noise and obtain stable orientation values. Based on this processed data, the system determines whether the product is leaning forward or backward and by how much.
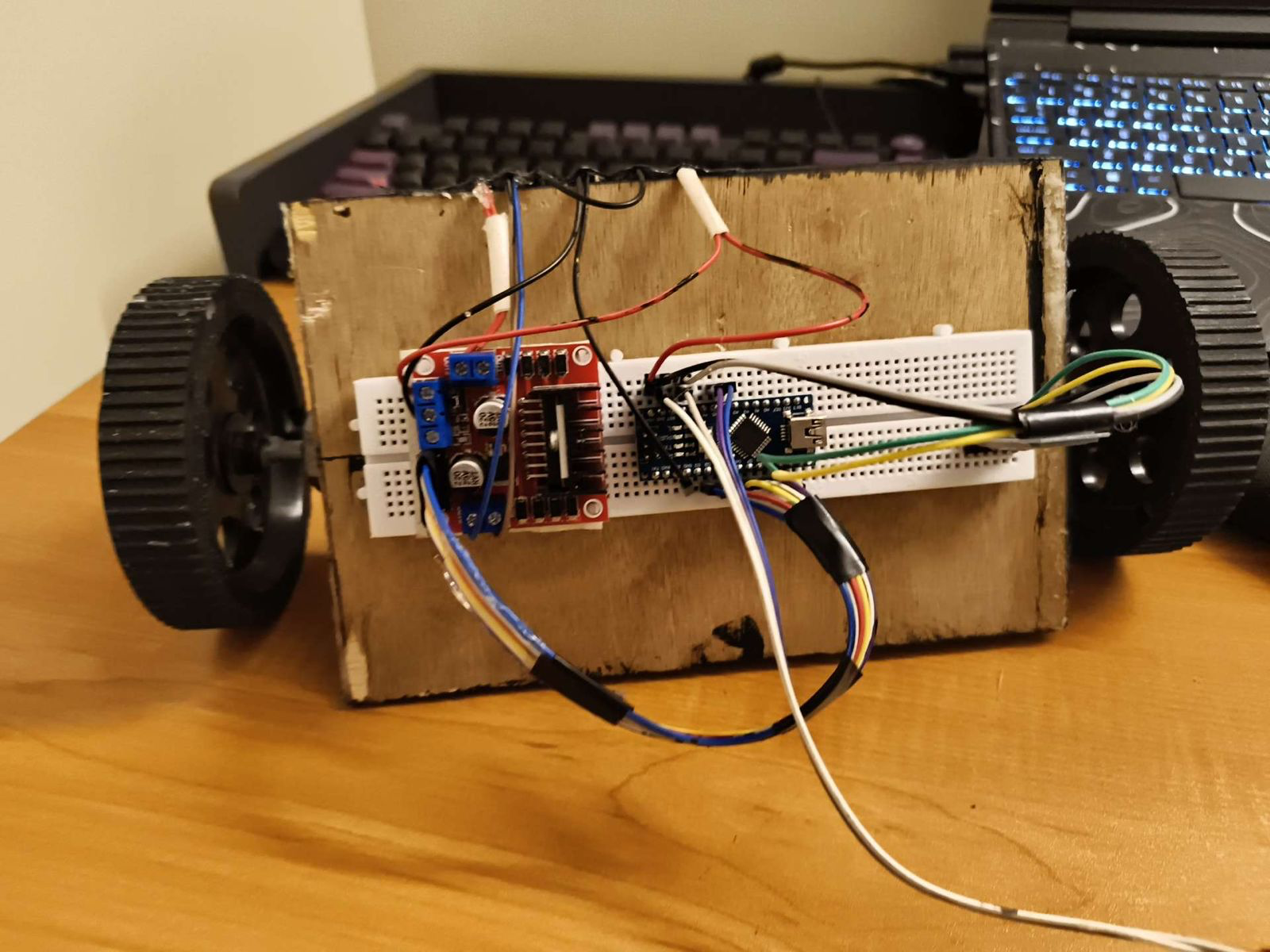
To correct any imbalance, a PID (Proportional–Integral–Derivative) control algorithm is implemented in the Arduino. This algorithm calculates the exact motor response required to counteract the tilt by adjusting motor speed and direction in real time. Since the product is large and heavy, high-torque DC motors are used, driven through high-current motor driver modules capable of handling large power demands without overheating. The motors respond instantly to control signals, allowing the system to regain balance smoothly and efficiently.
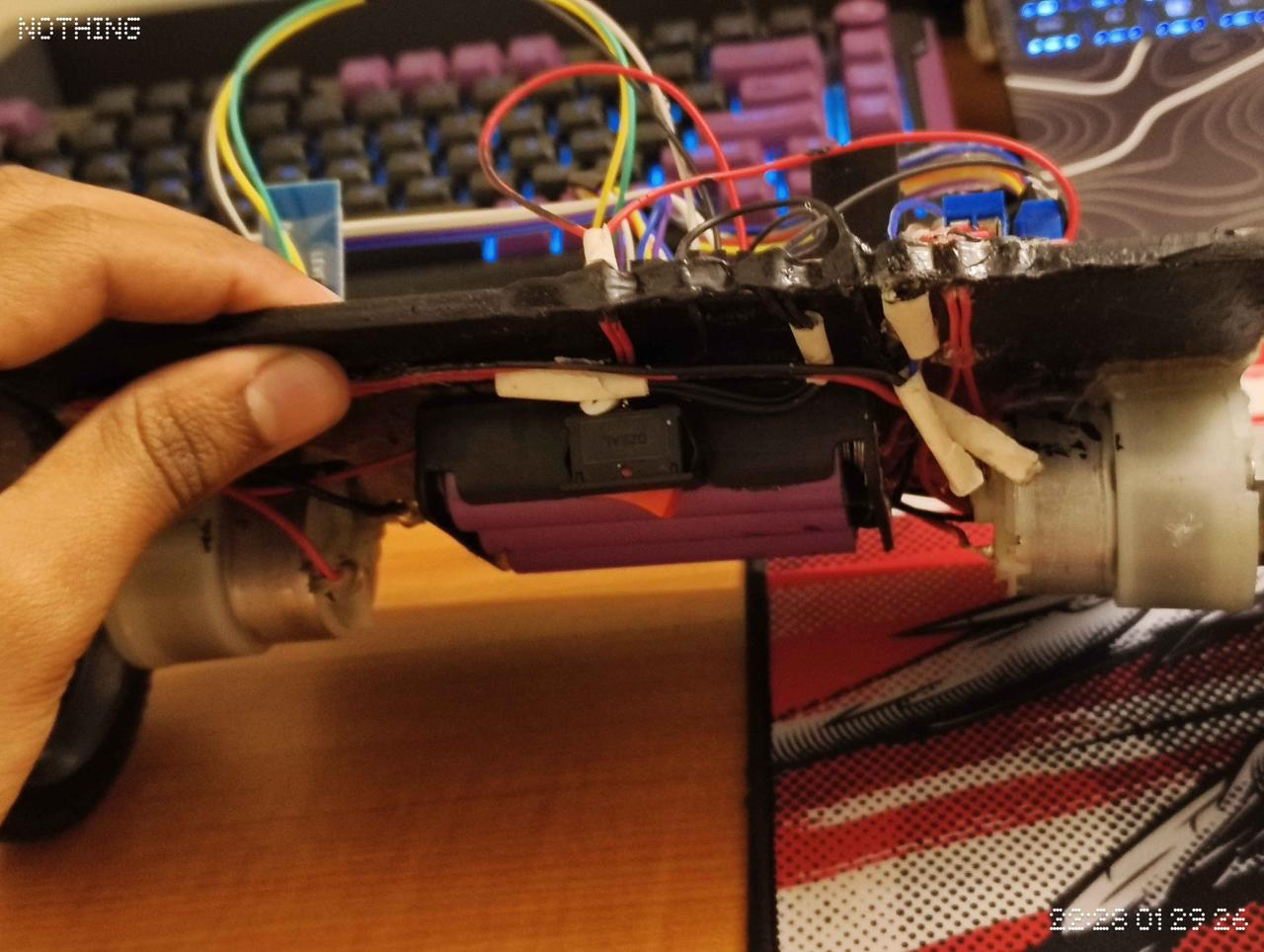
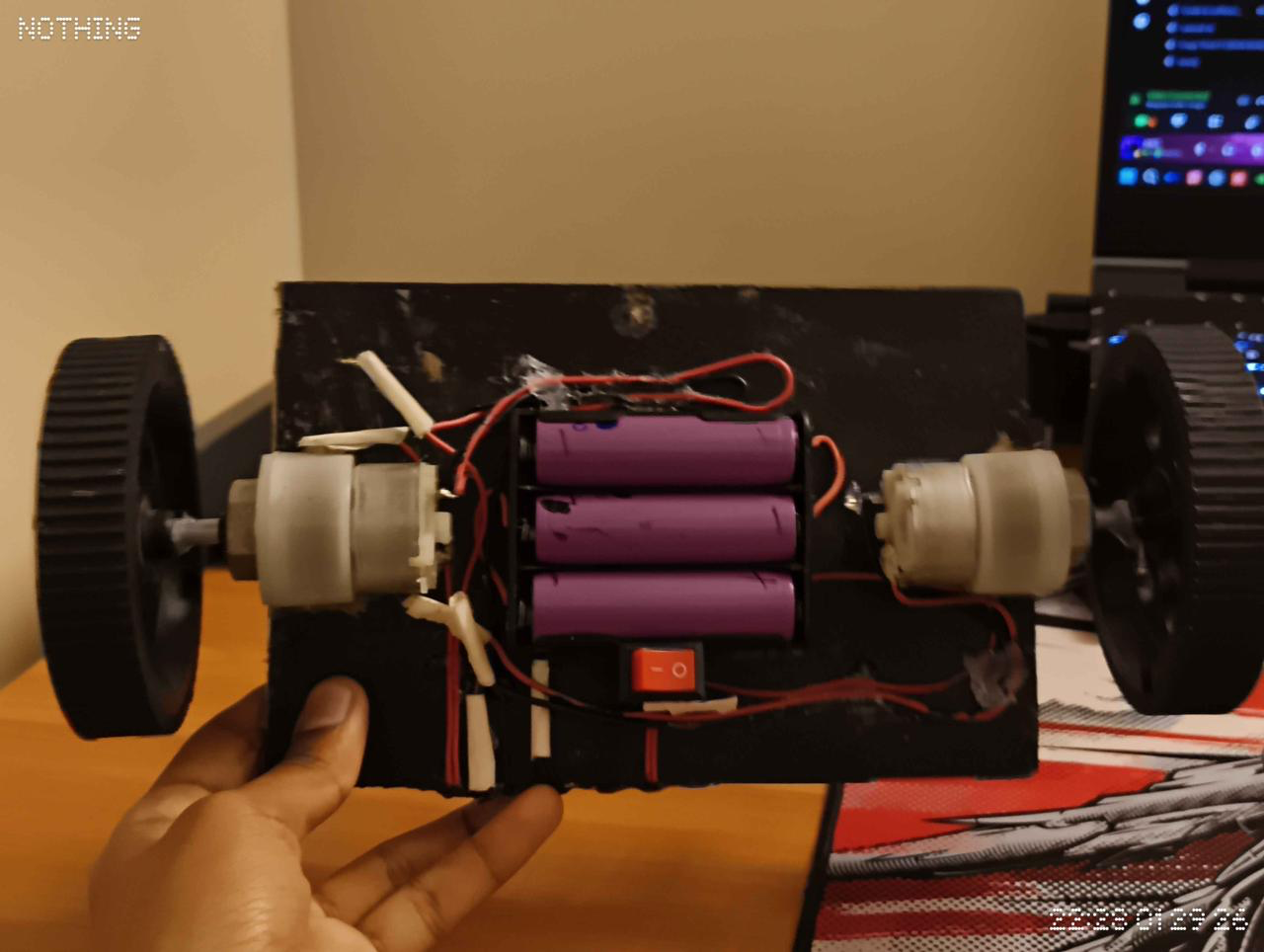
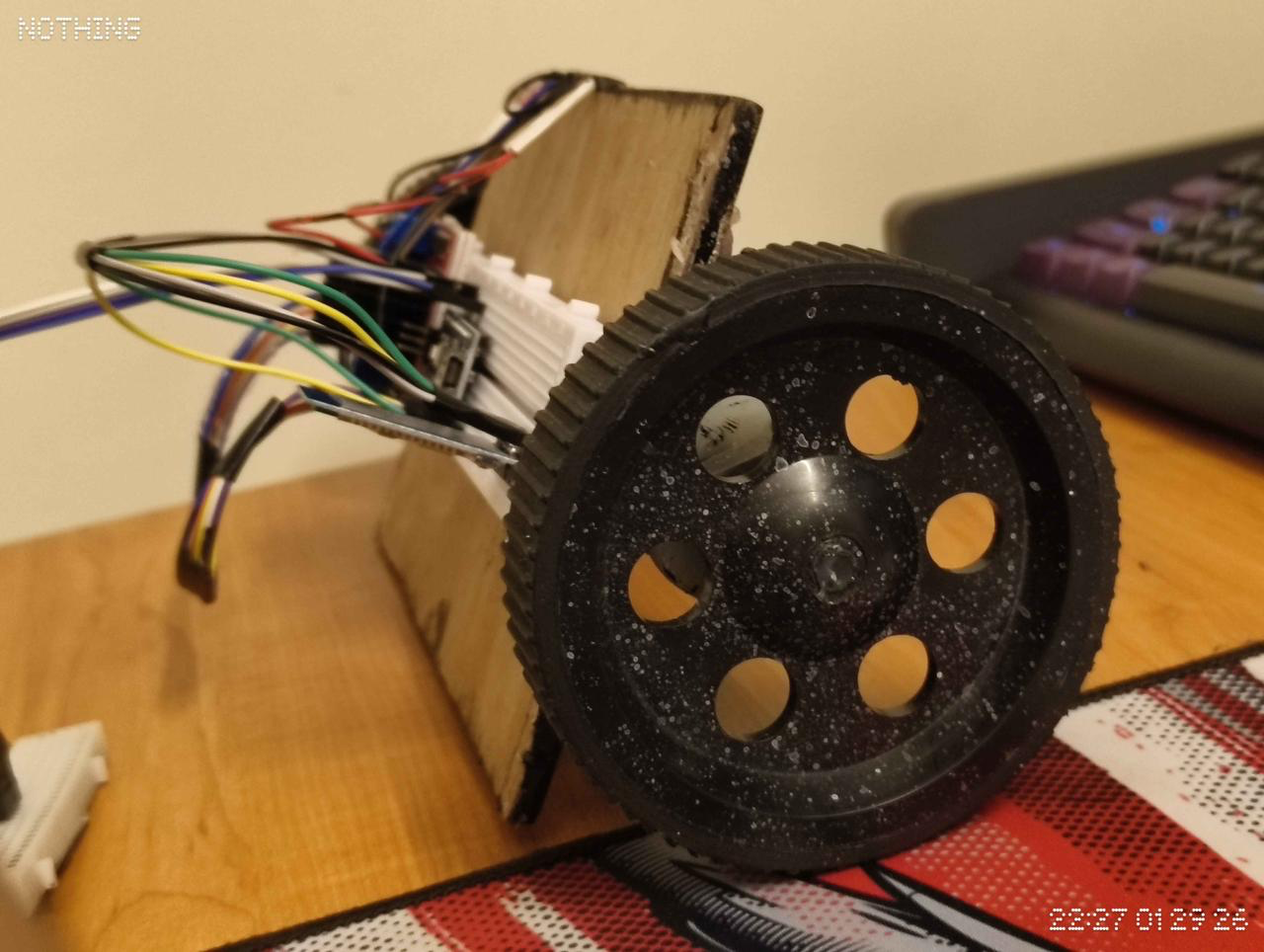
The mechanical structure of the product is carefully designed to support the increased weight and size, using a strong frame to minimize vibrations and unwanted movement. The center of gravity is optimized to improve balancing efficiency, while wheel alignment and motor placement are adjusted for maximum stability. A robust power management system is implemented using high-capacity batteries, voltage regulators, and protection circuits to ensure consistent power delivery to both the control electronics and motors.
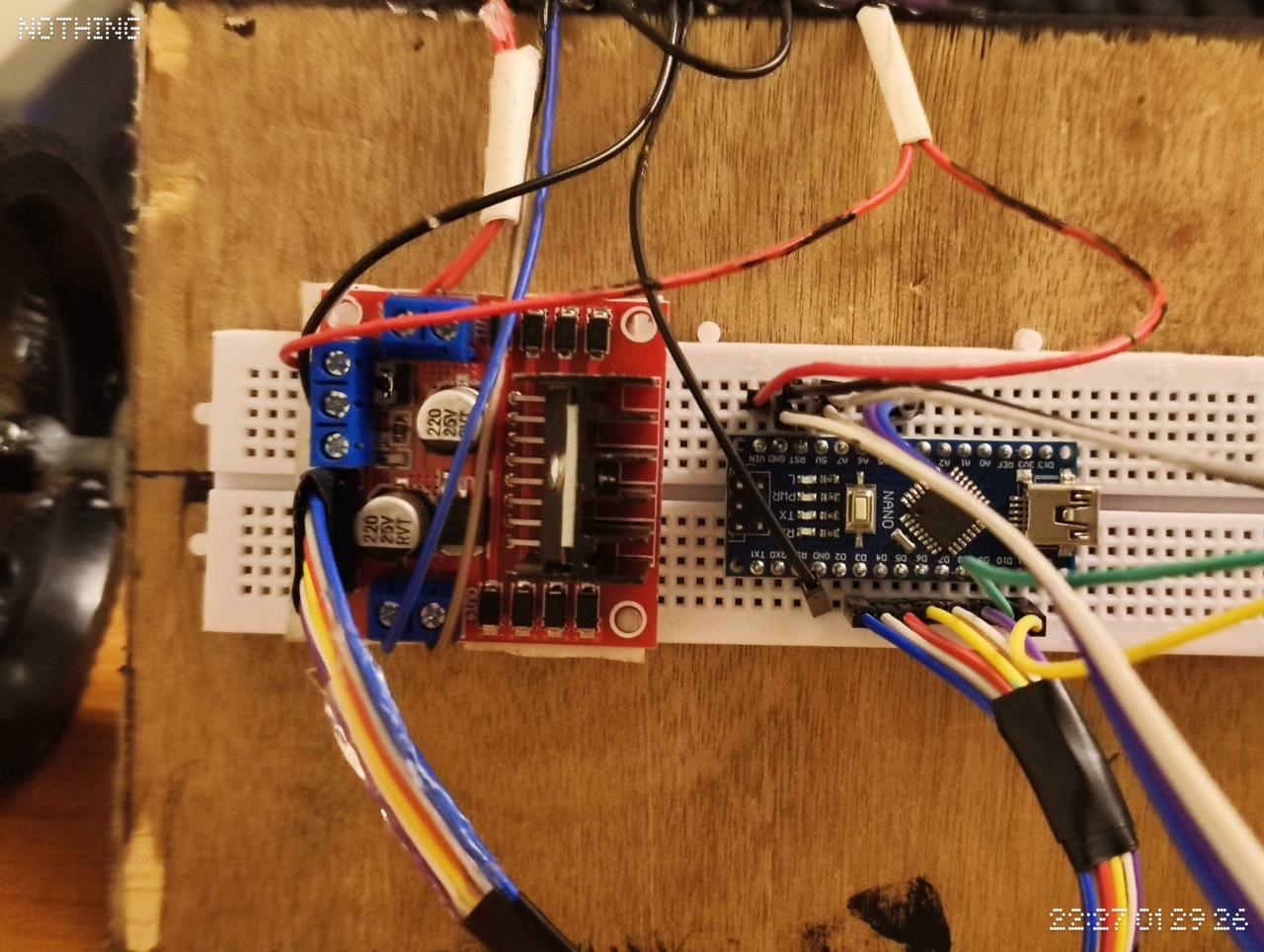
Core Hardware Specifications
- Arduino Nano
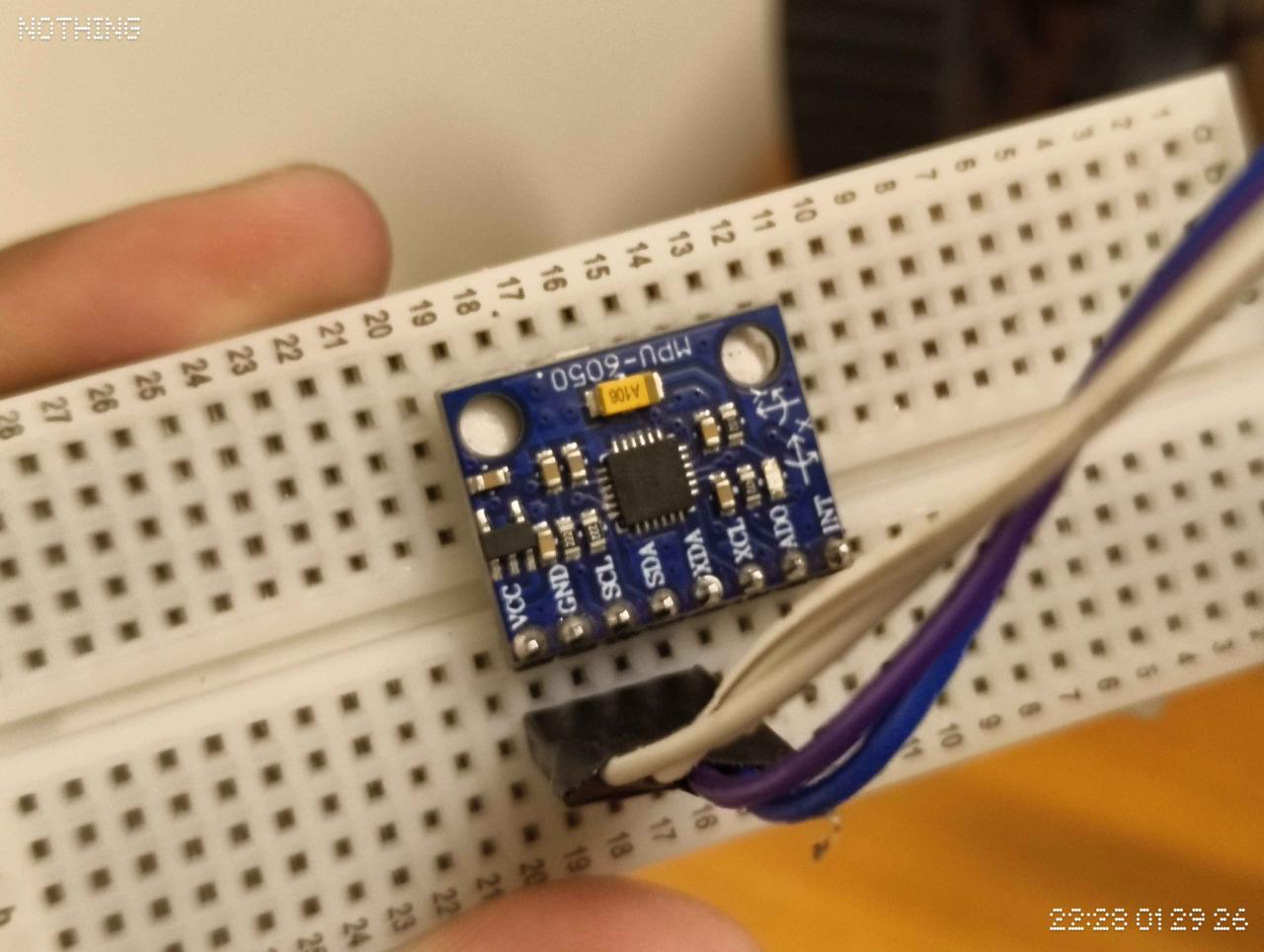
- MPU-6050 Gyrosensor
- L298N Motor Driver
- 2× Geared Motors (300 RPM)
- Active Buzzer Module
- 1× Status LED
Extensive sensor calibration and PID tuning are performed to adapt the system to real-world conditions such as uneven surfaces, sudden disturbances, and load variations. Safety considerations such as controlled startup, gradual motor acceleration, and emergency shutdown are also included to protect both the hardware and users. Through the integration of embedded electronics, control systems, mechanical engineering, and software logic, the KOMEQ[R]product achieves stable, reliable, and smooth self-balancing behavior, making it suitable for large-scale practical applications and real-world usage.
Core
Hardware
Dual-axis reaction wheels working in tandem with IMU sensor fusion. The brain behind the physics-defying 0.05ms balance latency.
Sensors & IMU
6-axis gyro tracking orientation
Flywheels
High-torque BLDC motors at 15k RPM
Logic Control
STM32 Microcontroller w/ PID loops

Made Possible By
Our Team
A self-balancing revolution built through relentless engineering, precise mathematics, and creative vision.
Voices of the Pioneers
Customer Review Form
We value your feedback. Please take a
moment to review your experience with us.